Компания BQ выпустила программу для 3D-сканирования Horus и 3D-сканер Ciclop с открытым исходным кодом
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах.
Отписаться от уведомлений вы всегда сможете в профиле автора.

Недавно испанская компания сообщила о выпуске первого 3D-сканера Ciclop для самостоятельной сборки, а также программе для 3D-сканирования Horus.
Производитель выложил в открытый доступ чертежи Ciclop, а также сведения о его электронике, программном обеспечении, алгоритмах и ранее проведенных экспериментах, чтобы любой желающий смог собрать свой собственный 3D-сканер. Что касается Horus, эта программа позволяет экспериментировать с Ciclop и была выложена на GitHub для пользователей, которые хотят улучшить ее своими силами.


«Также нас интересует процесс постобработки и внедрения Horus. Нам очень интересно мнение сообщества, и мы всегда открыты для предложений. Мы предлагаем вам принять участие в нашем проекте!» – говорит представитель компании.
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Свой собственный 3D-сканер
Подготовка
Для того, чтобы найти точки в 3D пространстве, существует несколько способов.
Простейший из них — это использовать 3 числа, чтобы описать позицию одной точки по отношению к другой.
Этот способ используется большинством компьютерных моделей.
Другой способ — использовать 3 плоскости или плоскость и линию.
Как видите, проще всего пользоваться третьим способом, а потом привести его результат к первому.
Однако возникает вопрос, как найти плоскости и её точки?
Как оказалось, первое реализуется аппаратной частью, а второе программным обеспечением.
Аппаратная реализация

Сначала я люблю объяснить основную идею, а затем переходить к реализации. Это поможет вам находить свои собственные решения.
Итак, нам нужно найти плоскость и как-то записать, где эта плоскость находится, чтобы компьютер смог составить модель.
Хотя многие используют для этого нахождение краёв тени, я решил пойти другим путём.
Я нашёл у себя очень яркий зелёный лазер (можно использовать лазер от обычной лазерной указки, если у вас нет такого).
Лазер я направил через цилиндрическую линзу, которая превращает его в линию. Эту линию я и использовал для нахождения плоскости. Это отлично работает, но имейте в виду, что размер вашего сканера будет сильно ограничен размерами объектива: мой объектив примерно в треть дюйма в диаметре, и я ограничен сканируемым пространством примерно 2′ на 6″ на 6″. Линзы меньшего размера будут работать лучше, но мне это не нужно.
Корпус

Для начала нам нужно сделать ящик, в котором будет находиться сканер. Низ и задняя стенка ящика сделаны из меламина, боковые стороны из фанеры. После того, как всё было сделано, я решил, что меламин является ненужным: возьмите фанеру и закрасьте её белым цветом. Это сэкономит вам несколько долларов.
Установка лазера
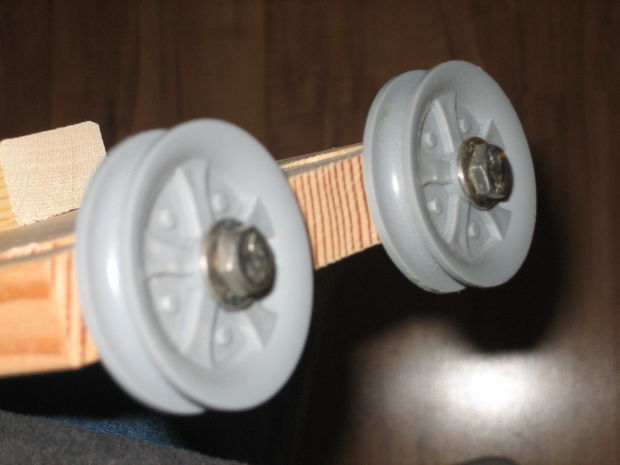

Следующим шагом является установка и крепление лазера.
Я использовал старый кусок дерева. Ролики установлены таким образом, что лазер катится по рельсам в верхней части окна. Там лазер и объектив монтируется так, чтобы плоскость света падала перпендикулярно верхней и нижней части окна.
Установка камеры
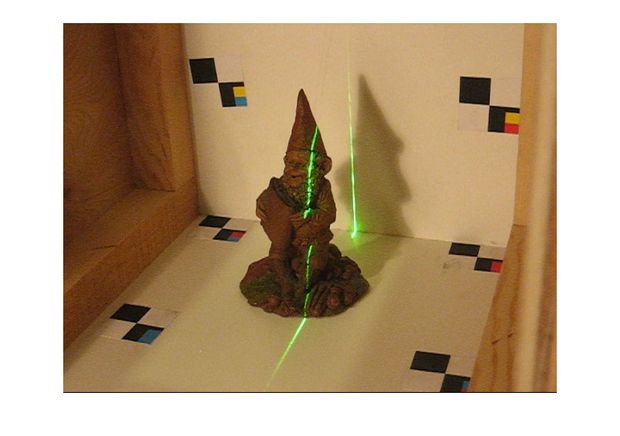
Камера должна быть установлена сбоку, выше объекта. Это гарантирует, что лазерная линия будет отклоняться должным образом.
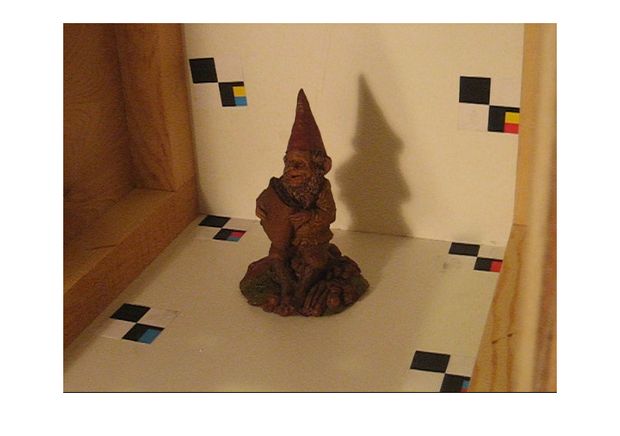
Теперь можно поставить какой-нибудь объект. Я использовал гнома. Посмотрите на камеру, и убедитесь, что лазер заметно отклоняется над объектом. Посмотрите на фотографию ниже, чтобы получить представление о том, что я имею в виду.
Программное обеспечение
Идея, лежащая в основе программного обеспечения, также довольно проста. Есть ряд точек, каждая из которых соответствует пикселю на камере. Фокус в том, чтобы узнать, как перевести точки между двумя пространствами. Как оказалось, это сводится к довольно простым уравнением.
Выполняем сканирование
Пришло время испытать наш сканер!
Сейчас сканируется лишь одна часть объекта — та, которая направлена в камеру. Однако можно доработать сканер.
Дальнейшее развитие
Ещё некоторые идеи, которые можно реализовать.
Лучшие проекты самодельных 3d-сканеров
Самое популярное
Доступный по цене и качественный 3D-сканер можно сделать и самостоятельно. Просто выберите наиболее подходящий вариант из списка лучших на сегодня самодельных 3D-сканеров.
Для чего нужно сканирование?

Что общего между Суперменом и антиутопическим обществом, изображенным в романе Филиппа К. Дика «A Scanner Darkly» («Помутнение»)? Если вы сразу подумали о способности сканировать все и всех, то мы оба думаем в одинаковом направлении.
Технология 3D-сканирования оказывает существенное влияние на различные отрасли – от систем безопасности и общественного наблюдения до медицинского сектора. Его роль в машинном распознавании образов, робототехнике и вождении автономных транспортных средств также сложно недооценить. Если говорить о 3D-печати, одним из ключевых ее достоинств является экономия времени на создание 3D-моделей.
Для несерьезного проекта в духе «сделай сам», основанного на 3D-сканировании, вам может понадобиться только цифровая зеркальная камера или даже камера вашего смартфона. Поэтому стоит обратить внимание на некоторые из наиболее интересных экземпляров самодельных 3D-сканеров.
Как работают 3D-сканеры?

Что такое 3D-сканер и как он работает? К сожалению, на этот вопрос ответить непросто. Все потому, что 3D-сканирование происходит несколькими способами. Если не вдаваться в детали, можно назвать два из них:
Если вы хотите на собственном опыте проверить технологию 3D-сканирования, но не готовы платить большие суммы за 3D-сканер, его самодельная вариация станет для вас верным решением. Ниже приведен список самых популярных самодельных 3D-сканеров на 2019 год. Но перед этим давайте подробнее рассмотрим программное обеспечение для фотограмметрии и 3D-сканирования.
Фотограмметрия: ваш смартфон – ваш сканер

Фотограмметрия, или процесс оценки трехмерных координат по нескольким изображениям одного и того же объекта, безусловно, станет самым дешевым путем 3D-сканирования для вас. Некоторые профессиональные сканеры, способные работать с воздуха на дальних расстояниях, влетят в сотни тысяч евро. Но вы можете подвесить камеры на воздушных шарах (или воздушных змеях) для достижения такого же профессионального качества за 1% от этой стоимости.
Аналогичного эффекта можно достичь и при помощи обычного смартфона. Камеры современных смартфонов имеют достаточное качество, чтобы добиться довольно хорошей печати всего объекта. Просто установите камеру на ручную экспозицию, держите камеру (или смартфон) в руке и делайте фотографии вокруг выбранной цели со всевозможных углов.
Убедитесь, что между кадрами имеется большая степень совпадения (70-80%). Старайтесь соблюдать равное расстояние от выбранного объекта и держите его в центре кадра. Вы можете начать с 50-ти снимков, но чем больше снимков вы сделаете, тем точнее будет ваша окончательная модель.
Фотограмметрия в значительной степени зависит от качества программного обеспечения, используемого для сопоставления всех изображений и получения соответствующего набора координат, формирующих ваш объект. Таким образом, по сравнению с лазерными системами роль программного обеспечения в редактировании, обработке, соединении, проверке и визуализации ваших сканов еще более важна.
Программное обеспечение для 3D-сканирования и редактирования

Рынок программного обеспечения для визуализации и редактирования информации, получаемой путем 3D-сканирования, предлагает множество вариантов. Как правило, этот тип программного обеспечения будет довольно дорогим, и производители профессионального оборудования часто предоставляют свои собственные программные решения для работы.
Но если вы следите за фотограмметрией, то можете комбинировать различные бесплатные программы, например, ColMap или VisualSFM в сочетании с CMVS-PMVS. Полученные результаты могут быть дополнительно обработаны программами в открытом доступе: MeshLab, Blender или Cloud Compare. Они помогут правильно обрабатывать и редактировать заснятые данные.
Если вы хотите делать все прямо со своего смартфона или планшета, можно рассмотреть TRNIO (iOS), который использует «облачные» технологии, или SCANN3D (Android), который работает за счет имеющейся мощности. (Для второго вам лучше иметь высококлассное устройство).
Для компьютерной обработки можно использовать Agisoft Photoscan или Reality Capture. В 3DF Zephyr есть бесплатная версия, которая позволяет вам обрабатывать до 50-ти изображений. Autodesk также предлагает программное обеспечение ReCap, способное запечатлевать реальные объекты, для компьютеров и мобильных систем. Это обеспечение можно использовать и для фотограмметрии лазерных сканеров.
Проект 1: 30-долларовый 3D-сканер V7

Это один из самых простых проектов самодельных 3D-сканеров. Основная идея заключается в том, чтобы собрать платформу, на которую вы установите смартфон. Все, что вам нужно, – это подставка, свободно вращающаяся вокруг своей вертикальной оси.
Для работы необходимо подключить гарнитуру телефона. Кнопка громкости должна быть установлена под рукояткой. Она запускает камеру удаленно, делая 55 фотографий на каждый полный оборот вокруг сканируемого объекта.
Цифры многое говорят об этой вращающейся подставке для 3D-сканирования. Дизайн, созданный Daveyclk, был загружен с веб-сайта Thingiverse более 170 000 раз. Вы можете бесплатно загрузить все файлы, необходимые для 3D-печати этой подставки.
Поскольку в этой конструкции не используются двигатели или электроника, вам не понадобятся никакие драйвера (или подключение к компьютеру). Тем не менее, чтобы преобразовать несколько фотографий в 3D-объект, вам потребуется программное обеспечение для фотограмметрии. Дизайнер предлагает использовать 3DF Zephyr для этой задачи.
Проект 2: 3D-сканер для мобильного телефона

По сравнению с предыдущим 3D-сканером здесь у вас есть неподвижный объект, вокруг которого вращается мобильный телефон. Это немного сложнее, так как для управления платформой используются Arduino Uno и серводвигатель.
Телефон закреплен на вращающейся платформе диаметром 380 мм. Arduino управляет сервоприводом, который понемногу перемещает платформу. После каждого передвижения камера мобильного телефона запускается с помощью пульта дистанционного управления Bluetooth.
Вы можете скачать все файлы из Thingiverse. Дизайнер Tomodachi1 рассказывает, что вам понадобится нить накаливания стоимостью около 20-ти долларов и немного электроники, в том числе Arduino Uno или аналог, серводвигатель и пульт дистанционного управления Bluetooth.
Проект 3: Проект FabScan Pi

Если вам больше по душе использование лазерной триангуляции и небольшого количества компьютерных вычислений, то этот проект самодельного 3D-сканера для вас. Проект Fabscan, первоначально разработанный в 2010 году в рамках дипломной работы, представляет собой лазерный 3D-сканер с поворотной платформой. Он развился до четырех разных версий, работающих на основе Arduino и Raspberry Pi.
В основе этого проекта лежат не материалы, напечатанные на 3D-принтере, а нарезанные плиты МДФ, из которых собирается корпус и некоторые другие детали. Информация на веб-странице проекта очень полная, содержит подробный список материалов и макетов для резки деталей, а также инструкции по сборке.
Для получения дополнительной информации вы можете посетить некоторые страницы сайтов, посвященных теме «сделай сам». В том числе можно посмотреть эту версию для Arduino или ее вариацию Raspberry Pi. FabScan также обосновался на GitHub.
Проект 4: Фотограмметрия с воздуха

Больше склоняетесь к аэрофотограмметрии? Тогда не пропустите это. Вам понадобится всего лишь разместить камеру как можно выше, поближе к облакам. После получения изображений процесс обработки модели ничем не отличается от съемки камешков на пляже с помощью камеры в руке.
Для начала убедитесь, что в вашей камере установлена дистанционная (инфракрасная) система спуска затвора. Это обязательное условие для запуска камеры, когда она окажется на месте. Чтобы поднять камеру, можно использовать беспилотник, воздушный шар или (если погода слишком ветреная) воздушный змей. Безусловно, вам понадобится какой-то каркас, чтобы зафиксировать камеру на месте и исключить сбои в работе. В Public Laboratory есть отличная видео-инструкция, которая поможет понять, как это работает.
В заключение используйте наиболее удобное для вас программное обеспечение, чтобы обработать полученные изображения определенной местности. Если вам нужно еще больше вдохновения, вы можете взглянуть на отчет археологов, использующих воздушные шары для картирования археологических раскопок.
Проект 5: 3D-сканеры на основе FreeLSS

Free Laser Scanning System, или сокращенно FreeLSS, представляет собой концепт 3D-сканера в открытом доступе, который использует открытое аппаратное обеспечение и доступный каждому электронный лазер. По такому принципу были созданы и проекты нескольких других сканеров.
Одним из самых популярных является 3D-сканер Murobo Atlas, который был успешно профинансирован на Kickstarter в 2015 году. С 2016 года он также доступен для загрузки на Thingiverse. В то же время все детали или полностью собранное устройство можно купить в магазине Murobo. Существует два варианта: первый сделан из деталей, напечатанных на 3D-принтере, а второй – из акрила, вырезанного лазером.
Также необходимо упомянуть BQ Ciclop. Это 3D-сканер, который был разработан испанской компанией BQ несколько лет назад и использует ту же концепцию, что и Murobo. Благодаря некоторым обновлениям, сделанным после выпуска, он все еще не теряет популярности. Купить этот 3D-сканер можно комплектом деталей или в собранном виде на Amazon.
Если вы решите собрать его самостоятельно, на сайте BQ есть очень подробные инструкции. Файлы, необходимые для 3D-печати пластиковых деталей, можно загрузить с Thingiverse. Схемы электроники несложно найти на Github вместе с прошивкой и программным обеспечением для сканирования Horus. Обратите внимание, что на сборку вам понадобится минимум пара часов.
Проект 6: Автономный 3D-сканер

Этот автономный 3D-сканер, использующий алгоритм «формы силуэтов» для получения 3D-модели, был разработан Джуном Такедой в 2018 году. В его основе лежат прототипная плата GR-LYCHEE и камера. Идея алгоритма «формы силуэтов» состоит в том, чтобы снимать силуэт объекта под разными углами. Набор изображений затем преобразуется в данные, представляющие собой множество точек и отражающие отсканированную трехмерную форму. Далее из этих точек создается полигональная сетка, которая сохраняется на SD-карте в виде STL-файла. Вся эта работа выполняется одним устройством.
Сканирование делается простым нажатием кнопки на сканере. Ничто не может быть проще. Конечный результат – STL-файл, готовый к печати на 3D-принтере (файл требует нарезки перед печатью).
Разрешение сканирования составляет более миллиметра, поэтому вы не получите очень точные результаты с этим 3D-сканером. Хотя его не помешало бы обновить, достоинствами сканера все еще остаются скорость и простота в использовании.
Проект 7: OpenScan

OpenScan – это недорогая модульная система 3D-сканирования, основанная на фотограмметрии, которая находится в открытом доступе. Изначально OpenScan идет без камеры, но он совместим с различными устройствами. Вы можете использовать что угодно: от камеры мобильного телефона до профессиональной цифровой зеркальной фотокамеры.
По сравнению с другими сканерами фотограмметрии этот поворачивает объект вокруг всех трех осей, обеспечивая более точное сканирование, чем любой другой недорогой 3D-сканер.
OpenScan был разработан в 2018 году одноименной немецкой компанией. Вы можете купить полностью собранный сканер в магазине OpenScan или заказать его как комплект деталей. Если вы решите сделать все самостоятельно, загрузите необходимые STL-файлы для 3D-печати из Thingiverse. Дизайнер также поделился электронными схемами. Прошивку для Arduino Nano, которая является «мозгами» этого сканера, также можно загрузить с сайта OpenScan.
Если вы планируете собрать или купить этот сканер, вам потребуется программное обеспечение для фотограмметрии, чтобы создать 3D-объект из множества фотографий, полученных после сканирования. Список совместимого программного обеспечения можно найти на сайте OpenScan.
Любую помощь по эксплуатации или сборке 3D-сканера OpenScan вы можете получить на форуме или в туториалах. К сожалению, некоторые документы до сих пор доступны только на немецком языке, но дизайнер работает над их переводом на английский.
Проект 8: AutoScan

AutoScan выглядит как очень простое устройство для фотограмметрического 3D-сканирования, но скрывает в своем арсенале гораздо больше. Он состоит из двух частей. Одна – это вращающаяся платформа для сканирования, а другая – приложение для Android.
Дизайнеры создали приложение для Android, которое связывается с AutoScan через Bluetooth. Принцип работы очень прост: после того как вы сделаете фотографию на своем Android, приложение пошлет в AutoScan команду повернуть платформу на пару градусов. Это автоматизирует сканирование, делая его простым и быстрым. К сожалению, пользователям iOS не повезло. Это приложение работает только на телефонах Android.
AutoScan был разработан еще в 2018 году группой Hemda Maker из Израиля. Поскольку этот проект находится в открытом доступе, все файлы, необходимые для 3D-печати, можно загрузить из Thingiverse. Устройство работает на Arduino Uno R3 с модулем Bluetooth. Подробные схемы и инструкции также можно найти в Thingiverse.
Более дорогие варианты

Для сканирования людей или больших объектов лучшим выбором может стать более дорогостоящая система.
Sense 2 от 3D Systems может сканировать объекты размером до 2 x 2 x 2 м? с рабочим диапазоном до 1,6 м и разрешением 0,9 мм. В качестве альтернативы можно рассмотреть EinScan-Pro и EinScan-Pro+. Они обойдутся вам значительно дороже, чем обычный ручной 3D-сканер. В ручном режиме сканеры имеют точность 0,3 мм, которая может увеличиться до 0,05 мм, если сканер неподвижен.
3d сканер Ciclop

Приветствую всех. Сегодня — маленький обзор настольного сканера Ciclop.
В очередной раз магазин предложил взять на обзор что-нибудь. Поскольку меня давно интересовал вопрос применения данной штуки для нужд декоративной 3d-печати — я выбрал сканер.
Итак, сам сканер был разработан испанской компанией BQ, которая в настоящее время прекратила его поддержку (якобы из-за китайских подделок, но сомнительно. Сейчас данным сканером торгует и американская CowTech. Исходники для 3d печати частей сканера — лежат в свободном доступе на Thingiverse (там же ссылки на софт и электронику).
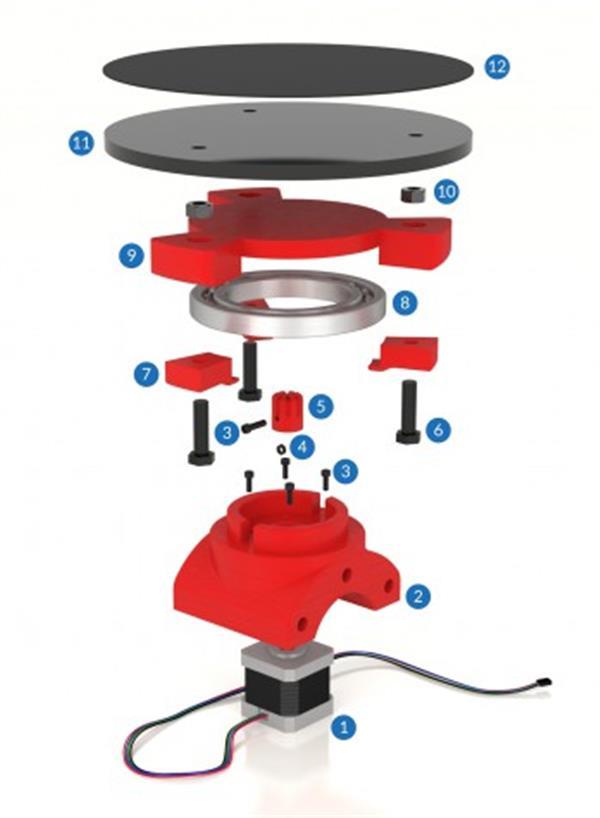
В комплекте имеем вот такую «рассыпуху»: 
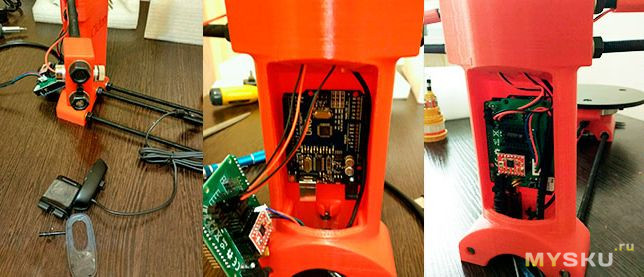
Сборка незамысловата, однако есть несколько моментов:
1. Спешить затягивать все гайки не стоит — придётся еще подстраивать геометрические размеры — сходимость лазеров в центре площадки, расстояния до поворотной платформы.
2. В моей стойке камера чуточку «болталась», на доли миллиметра — но этого хватило для перекоса картинки. Устранил подкладыванием вспененного материала.
4. Поворотная платформа была прозрачной и не имела покрытия (как в оригинале) — я покрасил ее plastidip-ом.
5. Проверяйте шаблоны калибровочной «шахматки». Не знаю как печатали ту, которая из моего комплекта — но пропорции квадратиков были нарушены. Взял из интернета и перепечатал сам.
6. Фокус камеры не настроен на расстояние до платформы. Снял крышку и подкрутил фокус по месту.




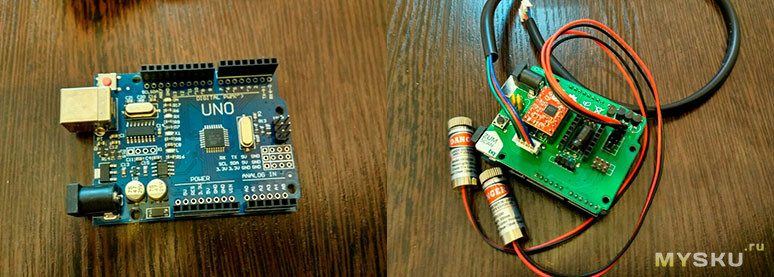
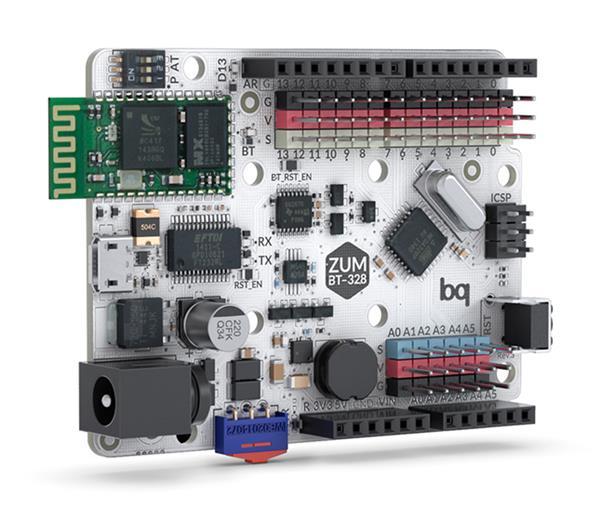
Как видим, «мозгами» сканера является обычная Arduino Uno в связки шилдом ZUM Scan и драйвером шагового двигателя A4988. Управляется хозяйство «родным» софтом Horus от BQ.
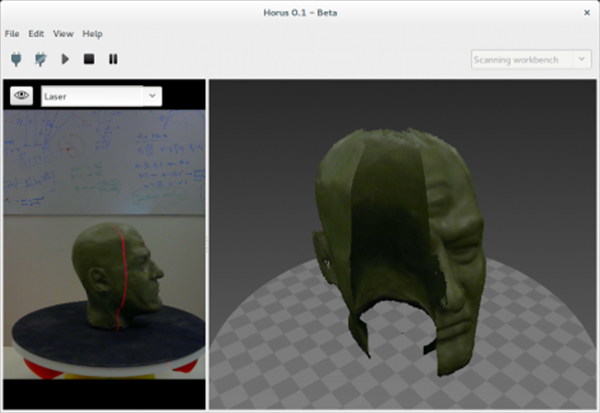
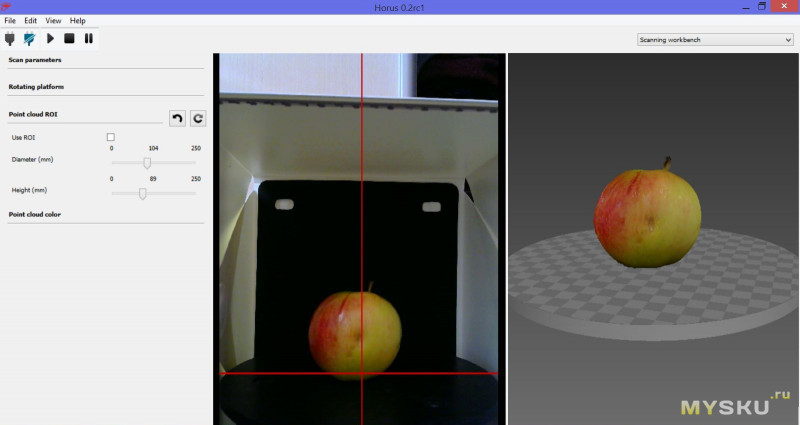
После сборки, сканер прошел калибровочные процедуры в родном софте Horus. 
Поскольку к этому моменту я уже знал, что качество сканирования очень сильно зависит от качества освещения (стабильности, рассеянности, цветовой температуры) я заранее озаботился наличием маленького лайтбокса, чтобы хотя бы обеспечить мало-мальски сопоставимые условия для проб. 
Подобрав «кандидатов» для проб, я приготовился. 
Требования к объекту заявлены такие:
1. Объект должен быть больше 5х5 см, но меньше чем 20х20см
2. Объект должен быть непрозрачным и неподвижным
3. Объект должен весить не больше 3 кг
Затруднительно сканировать:
1. Блестящие, светящиеся объекты
2. Слишком темные объекты
3. Объекты с размытой поверхностью (например, мягкие игрушки)
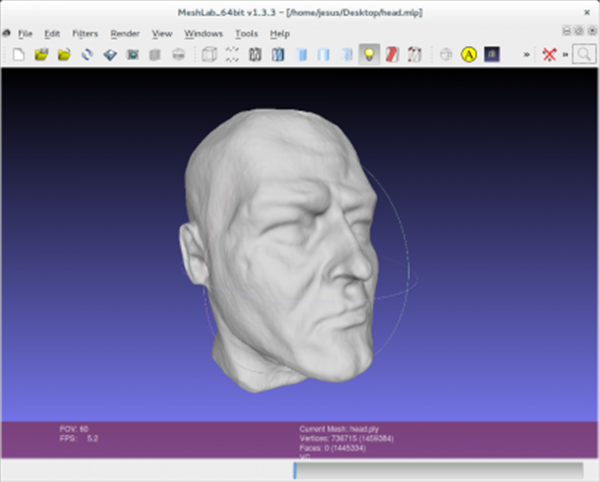
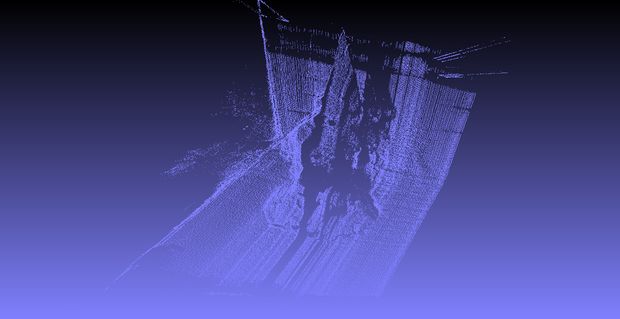
Результатом сканирования является облако точек в формате PLY (которые потом необходимо преобразовать в поверхность). Вот здесь руководство для пост-обработки облака и подготовки STL-файла.
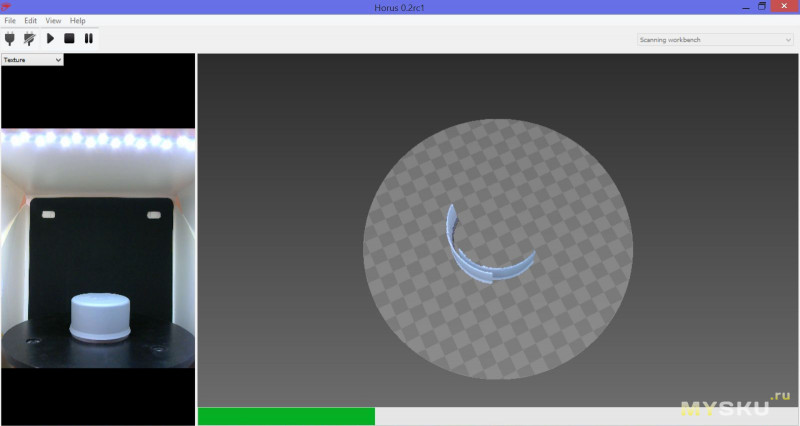
Почитав руководство по оптимизации сканирования, попробовать я решил с простого цилиндрического предмета.
После нескольких попыток я убедился, что имею распространенную проблему — несовпадения облаков точек от правого и левого лазера, да и с пропорциями вопрос.
Ничего путного по данному поводу кроме попытки откалибровать настройки вебкамеры (они не калибруются при работе мастера калибровки) найти не удалось (чувак по имени Иисус из саппорта BQ — давно не отвечает на вопросы). Для этого необходимо наделать несколько снимков с различными положениями калибровочной таблицы. Наделал. Положение улучшилось, но не до конца.
Пришлось ручками править калибровочный файл (calibration.json в папке Horus-a) и методом проб ошибок, сканируя цилиндрический предмет — добиваться совпадения облаков.
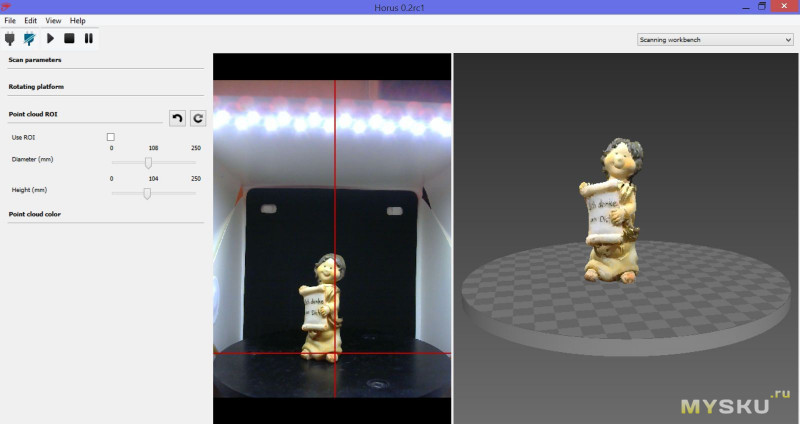
И вот вроде все ок: 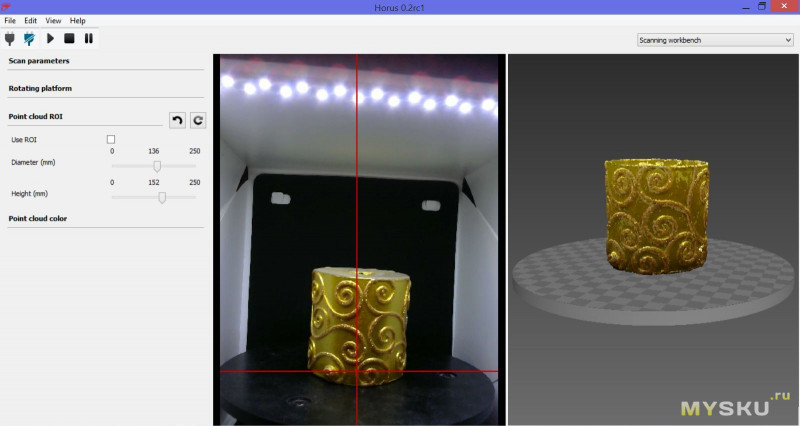
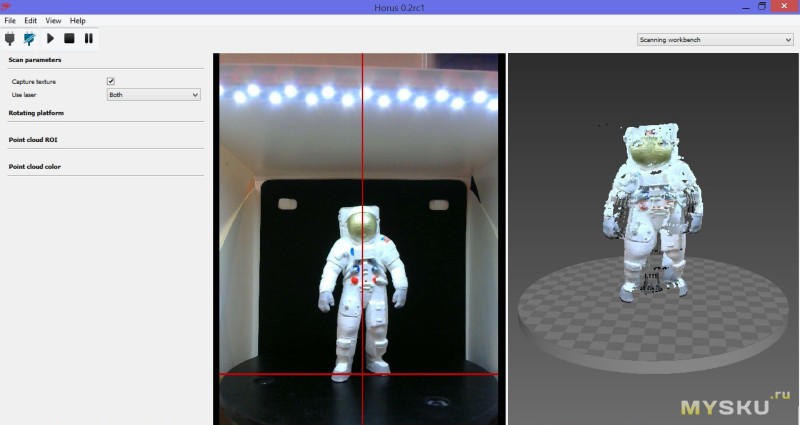
Но нет — на сложных предметах фрагменты облаков все равно порой не совпадают, к тому же образуется много «слепых» зон: 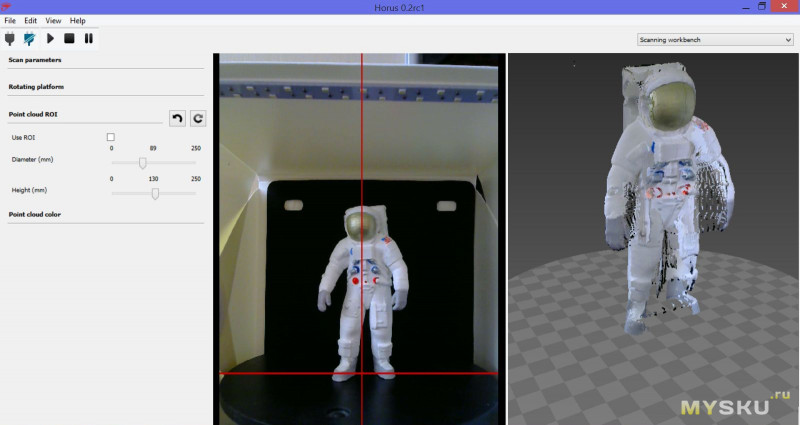
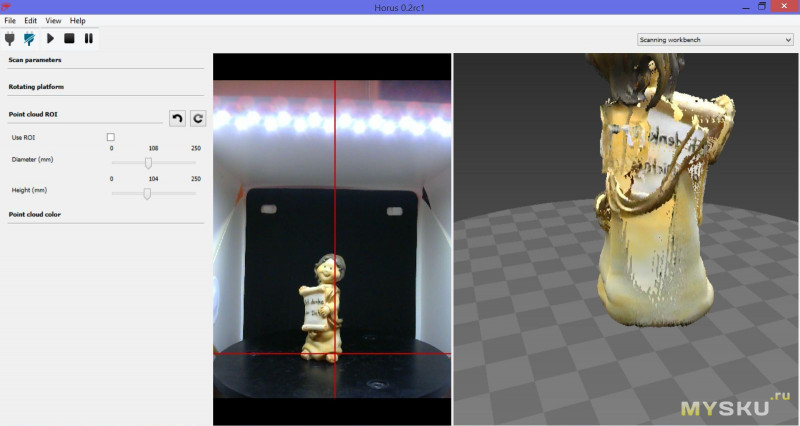
Кроме того, очевидно, что сканирование ярко красных предметов будет невозможно, во всяком случае с штатными лазерами.
Можно, конечно продолжать экспериментировать со сканированием отдельными лазерами и попытками в стороннем софте совместить все это хозяйство, а потом попытаться приводить в жизнеспособный для STL вид.
В общем, я понял, что адептом подобного творчества не являюсь, и имею подозрение, что с нуля смоделировать предметы, которые по силу сканеру — проще.
В итоге — штука сгодится только для изучения основ лазерного сканирования, для чего то более — абсолютно бесполезная. Нет, конечно, получить нечто очертаниями похожее на исходную модель — можно, но на этом (и это с учетом всех бубнов с обработкой облаков) — всё. Не зря видать испанцы закинули это дело.
Магазин подстраховался — в описании честно изложено, что результат зависит от положения планет и настроения тети Сони с третьего этажа. Опенсорс и все такое, давайте плясать вместе. Нет уж, спасибо.
Товар предоставлен для написания обзора магазином. Обзор опубликован в соответствии с п.18 Правил сайта.