Первый опыт использования собственного автопилота в Kerbal Space Program
Ну уж перейдем к делу. Для пробного использования была поставлена задача суборбитального полета.
«Суборбитальный космический полёт — космический полёт летательного аппарата по баллистической траектории со скоростью, меньшей первой космической, то есть недостаточной для вывода на орбиту искусственного спутника Земли.»[wiki].
В моей реализации полет состоит из пяти стадий:
1. Набор вертикальной скорости необходимой для достижения высоты 120 000 м.
UNTIL (ORBIT:APOAPSIS) > 120000
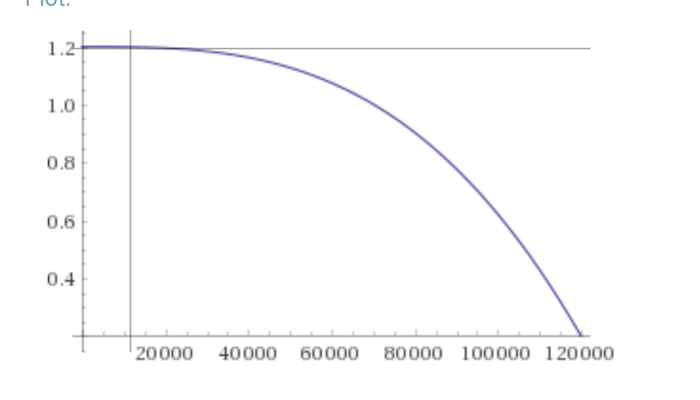
Из этой части скрипта видно использование пропорционального регулятора (хотя некоторые и советовали PID, но я не вижу в этом смысла в данной задаче).
К слову, график регулятора выглядит так:
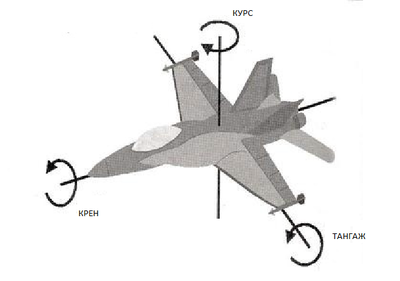
2. Установка курса 90 градусов:
LOCK STEERING TO HEADING(90,0).
3. Ожидание достижения точки апогея:
UNTIL SHIP:VERTICALSPEED 400<>
5. Торможение и активация парашютной системы:
PRINT «Включение двигателя торможения.».
LOCK THROTTLE TO 1.
PRINT «Отделение ядра космического корабля.».
PRINT «Отключение системы стабилизации.».
PRINT «Активация парашютной системы.».
PRINT «Давление частичного раскрытия: 0.04 Па.».
PRINT «Высота полного раскрытия: 1000 м.».
Для наблюдения параметров полета была написана программа мониторинга, запущенная на отдельном компьютере космического корабля. В общем, результат выполнения скрипта Вы можете наблюдать на видео представленном ниже.
P.S. : если кого то заинтересует данная тема то могу скинуть полные тексты скриптов.
Дубликаты не найдены
Стоп, там ж траекторию вычислять надо ж. Для чего я блокнот с карандашем купил\??
Да блокнот конечно пригодится) Я уже исписал много-много листов для проведения рассчетов параметров вывода корабля на круговую орбиту, но пока ничего не выходит, потому пока и суборбитальная. Ну а вообще сама игра и kOS предоставляет информацию о траектории, апогей, перигей и другие. Лучше посмотреть документацию от разработчика, а тут уже можно будет обсудить непонятные моменты)
Для орбиты можно сперва идти с постоянным TWR, сперва вверх, потом поворачиваем на восток. Потом включаем PID-регулирование, двигаясь prograde и регулируя TWR, чтобы точка апоцентра была в 1-2 минутах впереди. Затем округляем орбиту, двигась параллельно поверхности, но задиранием и опусканием носа PID-регулируя вертикальную скорость в 0, и набирая все это время горизонтальную скорость
Хм. Мне удалось поднять только на орбиту 10 км.
И как-то я умудрился запустить спутник хз куда в межзвездное пространство (она улетела обогнув восьмерку вокруг муны;( )
Игра прикольная, но времени много отнимает
О, роверы. Мне так и не удалось воплотить эту маленькую мечту
Ну вообще это весело да. Но интереснее сам процесс строительства и доставки, кататься не очень интересно, когда осознаешь расстояния которые нужно пройти
Да, кстати, меня всегда тянет строит как можно более реальные по ТХ корабли
Если будет время то освою сначала kOS, а потом можно и Real Solar System Mod поставить, и повторить реальные полеты
Подписался. Жду посты
Внезапный вопрос: под KSP есть мод, позволяющий работать не с KOS-скриптами, а непосредственно писать код автопилота в Си, Си++ и т.д. Не экспериментировали с ним?
KOS очень замечательно использовать с модом RemoteTech который заставляет иметь связь с центром или пилотируемым модулем с условиями + задержки отправки команд. тут очень пригождаются скрипты)
про RemoteTech:
https://pikabu.ru/story/ksp_opisanie_moda_remotetech_4619091
Я пользуюсь вот такой системой, это так,для устранения непоняток
Да, ошибочка вышла, исправлю)

И снова мудрый Танк Озера

В нашем доме поселился охеревший в край сосед
Дней пять назад пропало кабельное, жена мне сказала об этом в пятницу. Ну ок, мы хоть им не пользуемся толком и все онлайновое по подпискам, но надпись нет сигнала при включении телевизора стала подбешивать.
Да и вообще чего за фигня, уплочено же, я может потом Лебединое озеро на первом захочу посмотреть.
Вызвали дяденьку, дядя пришел пощупал мою самодеятельность, потом пошел в щитке лазить где разводка вся.
Оказалось мой ввод открутили и прикрутили соседа. Ну или он сам прикрутился. Посмотрели договора и ой как неожиданно мой соседушка в долгах, а я нет. Перекрутили назад.
Ну ждем продолжение истории.

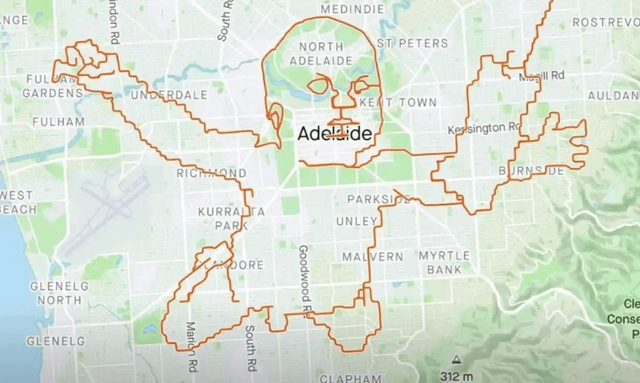
В Австралии велосипедист Питер Стоукс с помощью GPS-трекера нарисовал на карте обложку Nevermind в честь 30 годовщины выхода альбома
Для этого он проехал 150 километров.


Как же так?!

Внезапно
К такому жизнь меня не готовила.
P. S. познакомились, поужинали, оказалась гимнасткой)

Семья
Преступление было совершено в Красноярске во время пьянки. Четверо ранее судимых мужчин изнасиловали и убили 27-летнего приятеля.
По данным следствия, во время гулянки на квартире в компании начался конфликт. Четверо подозреваемых избили руками, ногами и дверцей от тумбочки пятого. После этого двое поочередно изнасиловали потерпевшего.



Размышления о стране

Карантин
— Добрый день, это по поводу ремонта. Ну что, мы с понедельника тогда начинаем работать, как и договаривались?
— Нет, не получится, у меня тут ковид случился, я на карантине. Так что пока отбой.
— Ну ладно, бывает. Отдохнёте хотя бы. Я вот две недели назад тоже на карантине с ковидом сидел. Кучу дел успел сделать зато.
— В смысле ты две недели назад тоже на карантине сидел!? Ты же у меня в это время объект смотрел.

И никто заказ не берёт.

Что считать нищетой в современной России?
из обсуждения по ссылке
возникли разногласия, что считать нищей жизнью.
Многим неприятно осознавать это, но большая часть населения в России будет нищими по такому критерию.
А как вы определяете нищету, бедность и средний класс?

Вечеринка с объявлением пола будущего ребенка не удалась

Блокировка с нового обзора BadComedian снята


Про автомехаников

На матче

Соотношение цена-качество
Относилась к работе очень ответственно, но когда 4 месяца мне платили меньше всех в фирме при том, что я делала кучу работы, забила на работу. Прихожу к 9, до 10 пью кофе, потом сижу в своих соцсетях, потом опять кофе, и так до 3-х дня, а после до 6 делаю работу. Все успеваю, как всегда, но теперь меня не заваливают кучей работы, так как сижу, вечно окопавшись в бумажках, и все думают, что я усердно тружусь ежесекундно. В то время как я сижу, читая книгу. С «таким» распорядком и зарплата теперь не кажется такой уж мизерной.
Развлекаются как могут

Купил бабушке дом и теперь разборки с властями и журналистами
Друзья всем привет!
Хочу показать как работает власть на местах.
Начинают заниматься проблемами, только после общественного резонанса и нагоняя от губернатора.
Сначала короткий сюжет на канале ОТР.
А теперь чуть подробнее:
В июле мне написал подписчик и рассказал историю о том, что старенькая бабушка инвалид и её сын вынуждены после пожара жить в развалюхе.
Я съездил, снял ролик о них 30 июля. И буквально за 3 дня подписчики канала собрали 200 тысяч на покупку нового дома.
И после выхода этого ролика зашевелилась местная администраци и на меня полился поток лжи.
Даже в группе «Подслушано в Пономарёвке» все комментарии о покупке дома подписчиками канала «Заброшенная Россия», зачищаются.
Я снял второй ролик, в котором показал правду.
Вы думаете хоть кто-то извинился?
Ну и Бог с ними, главное бабушка с сыном живут в хорошем доме.
В комментариях попросили ссылку на статью от Оренбургской журналистки.
Статья вышла после моего первого ролика.
Во втором ролике я разобрал всю ложь написанную в ней.
AtmosphereAutopilot CKAN
License: GPLv3
Game Version: 1.12.2
Source code: Boris-Barboris/AtmosphereAutopilot
Downloads: 40,686
Authors: BorisBarboris, Hotel26
Mod Website: Forum Thread
Followers: 324
Flight control system library, designed for atmospheric planes. Features complex fly-by-wire, camera-directed autopilot, cruise flight control.

Version 1.5.17 for Kerbal Space Program 1.12.2
Released on 2021-07-29
Version 1.5.16 for Kerbal Space Program 1.12.1
Released on 2019-11-12
Update for KSP 1.8.0
Version 1.5.15 for Kerbal Space Program 1.7.3
Released on 2019-07-15
Version 1.5.14 for Kerbal Space Program 1.7.3
Released on 2019-06-14
Fix bug when AA was unable to distinguish landed, splashed and flying situations, causing uncontrollability after model collapse.
Version 1.5.12 for Kerbal Space Program 1.7.1
Released on 2019-03-02
Version 1.5.11 for Kerbal Space Program 1.6.1
Released on 2018-08-19
Version 1.5.10 for Kerbal Space Program 1.4.5
Released on 2017-02-08
Version 1.5.9 for Kerbal Space Program 1.2.2
Released on 2016-12-10
Version 1.5.8 for Kerbal Space Program 1.2
Released on 2016-10-12
Version 1.5.7 for Kerbal Space Program 1.1.3
Released on 2016-08-10
Version 1.5.6 for Kerbal Space Program 1.1.3
Released on 2016-07-09
min KSP version: 1.1.3
Stock aero control surface authority limiter fixed
Fixed some crashes with cheesy named vessels
Sketch of thrust-balancing for VTOL-lovers (very raw, don’t expect much), toggled in Flight Model gui by button «balance_engines». Has hotkey («thrust balancing» in hotkey manager). Short video: youtube
Version 1.5.5b1 for Kerbal Space Program 1.1.3
Released on 2016-06-25
Don’t mind the title, it’s 1.5.5
Version 1.5.4 for Kerbal Space Program 1.1.3
Released on 2016-06-17
fixed bug with incorrect handling of navball in surface velocity mode;
Mini-AVC version files fixed;
stock-alike deploy direction of control surfaces under stock aero;
corrected GUI hiding (F2) code;
fixed old bug with stock control surfaces, wich snapped deflection to zero on small control signals. Behaviour on extreme dynamic pressure regimes significantly improved under stock aero, for both manual and automated flight;
speed control setpoint can now be controlled by ThrottleU and ThrottleDown keys. Can be toggled and tweaked in Prograde thrust controller’s GUI, consult docs;
close window buttons added;
Cruise Flight window reworked, advanced settings hidden, distance to waypoint readout added;
Cruise Flight setpoints are controllable by pitch and yaw keys if needed. Right Alt (configurable in hotkeys manager) toggles this behaviour. To toggle and tweak, adress CF window advanced options and docs;
corrected vertical speed behaviour on very large turns under CF control;
vertical speed setpoint added to Cruise Flight;
added hotkeys for Rocket mode and Coordinated turn flags of FBW;
MechJeb, или лёгкие полёты. / KSP Tutorial :: KSP Mod :: Kerbal Space Program (KSP, Kerbal Space Program) :: длиннопост :: фэндомы
MechJeb, или лёгкие полёты.

Тут вы найдете инструкцию по установке и основы мода.
Начнём с установки мода.
При установке любого мода на КСП всегда есть два стула:

Давайте сначала разберём «ручной» способ. Сначала вам надо скачать архив с модом для подходящий версии. Это можно сделать по ССЫЛКЕ. Далее вам надо разархивировать папку с модом в папку GameData. Пример:

Так же можно установить мод что снизу, он убирает потребность в установке модулей MechJeb на ракету.
Теперь перейдем к основам мода.
В первую очередь надо установить особый модуль на ракету.

Когда погрузиться мир в правом верхнем углу будет кнопка, угадайте под каким названием, правильно MechJeb. При нажатии на неё откроется меню мода.

Основные функции для начала:
Остальные функции пока не нужны, мы же разбираем основы.
Разберём улучшенный САС

Остальное сами поймёте.
Теперь разберём теперь манёвры

Разберём сначала 10й пункт:

Разберём теперь 1й пункт.

Что бы увидеть это окно, надо сначала выбрать планету.
Теперь разберём стыковку.
Нам понадобятся Rendezvous Autopilot и Docking Autopilot.
Сначала нам нужно перевести управления в стыковачный модуль.

Далее Выбрать цель, то есть другой корабль. Далее

Когда сближение прошло, нацеливаемся на стыковачный модуль цели. Далее в Docking Autopilot нажимаем Autopilot Enabled и ждем удачной стыковки.
На этом у меня все. Надеюсь вам хоть как-то помог этот гайд.
Ksp мод на автопилот
Mechjeb looks intimidating but it really isn’t. Alot of those options or info it gives you don’t need or have to move. The most important features you would use are probably:
1. Advanced SAS. Works just like regular SAS but with added options. You can manually set heading, pitch, roll with this which is great for not only Ships but planes as well. Or you can just use it like a normal SAS.
2. Ascent guidance. Looks intimidating with all those options but if you just look over them you will understand what they do. Pick what you want your orbit to be, if you want an inclination, if you want it to auto-stage for you. Also usefull for timing your launches for rendevouz.
3. Manuever planner. This will help make manuever nodes for anything you want to do. Alot of the time I will set nodes manually but have the planner execute them.
4. Landing Guidance. If you want to land at KSC or not. Very easy to use. Just select where you want to land, or pick it on the map and boom there you go.
5. Space Plane Guidance. I use this for flying planes. The «Initiate hold» option is wonderfull. Just put in a heading and altitude and it will bring the plane there and hold it.

Mechjeb looks intimidating but it really isn’t. Alot of those options or info it gives you don’t need or have to move. The most important features you would use are probably:
1. Advanced SAS. Works just like regular SAS but with added options. You can manually set heading, pitch, roll with this which is great for not only Ships but planes as well. Or you can just use it like a normal SAS.
2. Ascent guidance. Looks intimidating with all those options but if you just look over them you will understand what they do. Pick what you want your orbit to be, if you want an inclination, if you want it to auto-stage for you. Also usefull for timing your launches for rendevouz.
3. Manuever planner. This will help make manuever nodes for anything you want to do. Alot of the time I will set nodes manually but have the planner execute them.
4. Landing Guidance. If you want to land at KSC or not. Very easy to use. Just select where you want to land, or pick it on the map and boom there you go.
5. Space Plane Guidance. I use this for flying planes. The «Initiate hold» option is wonderfull. Just put in a heading and altitude and it will bring the plane there and hold it.
I havent unlocked all options yet.
And im having big troubles landing on the moon.
* I use SAS to get the ship at 45º when flying high.
* Once the Periasis is 100k kms i use the Manuever planner to circulize kerbin.
* Then i use Hohmann transfer to target to get to the mun.
Once i get there i:
1) circulize it at X kms and then try to mannualy land.
or
2) i try to manually land.
The result is that i crash all the times.
Ascent guidance, Landing Guidance and Space Plane Guidance still locked. Im playing on science.


If you have troubles with landin on Mun then:
Start from achiving orbit, but not to low you need to have time to kill your horizontal speed.
15 km should be fine.
Above your picked landing site ( best aim for flat zones ) make node and pull retrograde circle as long as it’s not flat falling down.
Click on upper part of navball to change it to surface mode.
Now check timer, how long it will take to burn this node and move at least half of this time node earlyer. And start burning it half time of burn before node.
Remember that Your hight is mesured in «above see level» not above ground. You might be even 4,7 km closer to ground.
And now slowing down your decent, keep it on reasnoble level, 50-100 m/s is fine. You can go faster and save some fuel but a lot depends on your accelelation. If you will see your shadow on surface of Mun then is best time to drop speed to
10 m/s and slowly drop it to 5m/s max at touchdown.
Be ready to use reaction wheels/rcs to keep your craft from falling on side after touchdown if you still had some horizontalspeed or there is slope. If you feel you won’t be able to not roll over then throttle up and try to land again as its almost impossible to start while laying on side.
Thing to consider:
Practice landing on Minmus first. It have much lower gravity and landing is much easier.
Also if you will need another atempt it won’t be so expensive in matter of fuel.
kOS-скрипт посадочного автопилота
Добрых шестичасовых суток!
Немного школьной физики и о том, как работает автопилот. За основу взята формула равноускоренного движения: 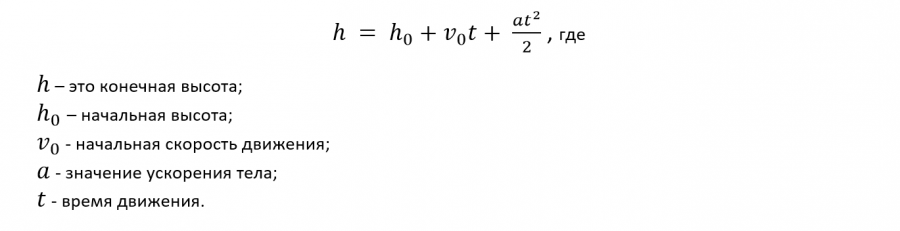
По-хорошему, падение тела в атмосфере не является равноускоренным движением, так как имеется зависимость ускорения свободного падения от высоты и наличия гравитационных аномалий, и как самое главное, есть сопротивление воздуха. Если первое практически незаметно на малых высотах, то сопротивление атмосферы дает ощутимое изменение в скорости падения. Но и этим мы можем пренебречь, если вести расчет в каждый момент времени полета/приземления.
Какие же данные нам необходимы на входе, а какие на выходе нашего расчета? Самое главное, что нам нужно, получить значение тяги двигателя в заданный момент времени. Направление/наклон корабля доверим встроенному SAS, но в будущем будем высчитывать нужные вектора сами. Соответственно на входе у нас будут: 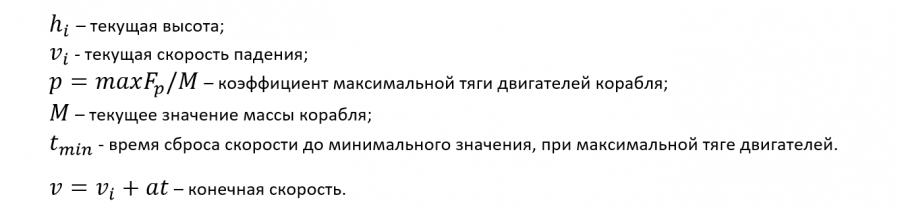
Из формулы h получаем ускорение a: 
Где текущее ускорение зависит от разности векторов сил тяги и притяжения, и выражается: 
Throttle – это текущее значение дросселя тяги корабля в % от максимальной maxFp. Отсюда: 
Запихиваем эту формулу в цикл:
until ship:status = «LANDED» or ship:status = «SPLASHED» or ship:status = «PRELAUNCH»
и получаем постоянное вычисление тяги до момента мягкой посадки.
Теперь от теории к практике.
Мы запустим небольшой лендер на НКО и посадим его при помощи скрипта.
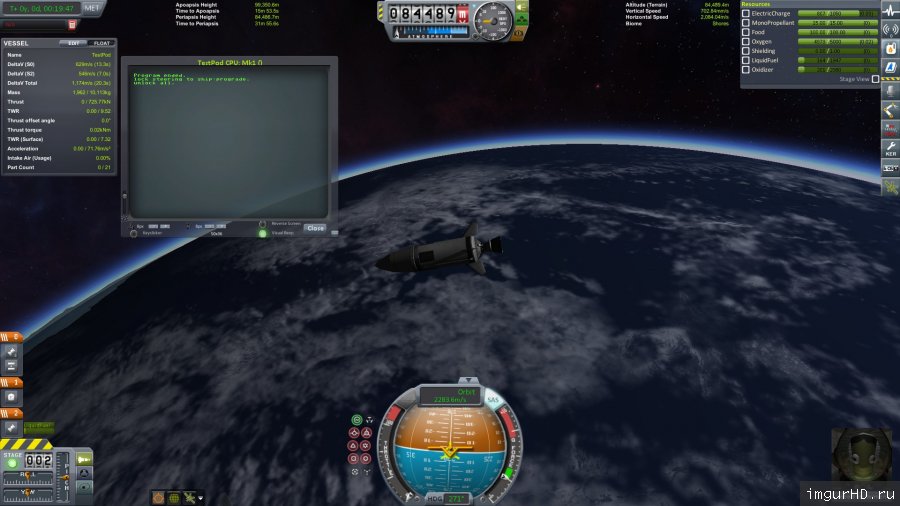
Копируем наш скрипт в память корабля, т.к. потом связи у нас не будет (антенну я благополучно забыл установить на лендер). Проверяем наличие файла командой list.

Тестируем скрипт, запускаем прямо на «стартовом столе»!

Скрипт сообщает, что корабль приземлился успешно, но он то не знает, что мы еще не стартовали. Так что вперед!


И прожигаем остаток топлива РН для маневра торможения и схода с НКО.
Сбрасываем обтекатели и отстыковываемся.

Проводим маневр аэроторможения и молимся о том, чтобы не сгореть и не попасть к кракену.

После успешного торможения в верхних слоях атмосферы, готовимся запустить наш автопилот.

Джеб в предвкушении.

Запускаем скрипт, после чего лендер разворачивается в ретрогрейд и на экране kOS появляются текущие параметры полета.

В нужный момент скрипт активирует двигатели и начинается сброс скорости. К примеру, было потрачено 510 единиц дельты на весь маневр торможения.

В итоге, наш аппарат приземляется и автопилот отключается.

P. S. Подводные камни.
Как всегда, не все так прекрасно, как очень хочется. Нельзя просто так запустить скрипт на любом аппарате, удобном для посадки на Кербине, или еще где. Необходимо учесть два параметра, разных для каждого аппарата.
1. Измерение высоты полета над поверхностью не учитывают высоту самого крафта, в следствии чего расчетная финальная высота в реальности оказывается ниже уровня земли, и мы получаем не очень мягкую посадку.
2. Инертность работы скрипта ведет к зависанию аппаратов с двигателями с большим TWR над поверхностью земли, т.к. импульсы тяги больше, чем нужно, и скрипт вылетает из-за потери ретрогрейда.
Если в решении второй проблемы я ввел в скрипт программный лимит тяги (эмпирически выведен лимит в TWR=2), то для решения первой приходится вводить данные о высоте крафта в скрипт, а точнее высоту расположения командного модуля относительно самой нижней точки крафта.